CASE STUDY: ROBOTICS AUTOMATION FOR BIOTECH APPLICATIONS
Using RoboDK, Digital Twins, and Physical Testbeds with OTS Robots to Reduce Design Effort and De-risk Robotic Integration
Customer Need
A client was developing a biotech instrument for workflow automation and wanted to explore other architectures options in parallel to the one they were using internally. The client’s system was limited by the gantry system due to the complex motion required for each workflow.
The goal was to explore alternative approaches to handling the automated workflow, ideally with an off-the-shelf industrial robot. Any potential solution had to meet the predefined workflow, work with the space constraints, and operate with the existing subsystems in the product.
Solution
Simplexity evaluated SCARA (Selective Compliance Articulated Robot Arm) and 6DOF (Six Degree of Freedom) Robotic Arms to see which would be more effective at completing the required tasks.
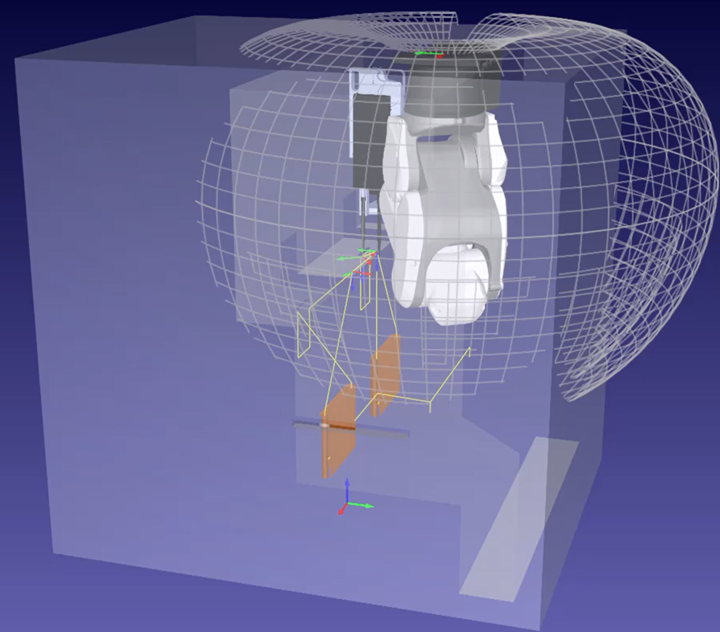
Simplexity used RoboDK, a universal robotic motion simulation software, to help narrow down the viable robot solutions available in the market. Using this RoboDK software, we were able to import the specific geometries, spacing limitations, and constraints to get a more detailed evaluation of potential industrial robots before building testbed hardware. We were able to use the simulations to complete reach studies on the various robots and confirm which would work best for the final configuration. In this application, the flexibility of the 6DOF robot arm provided the ability to freely manipulate the position of each joint during complex moves and ensure the entire system stayed within a very narrow operating space while still reaching all the required positions.
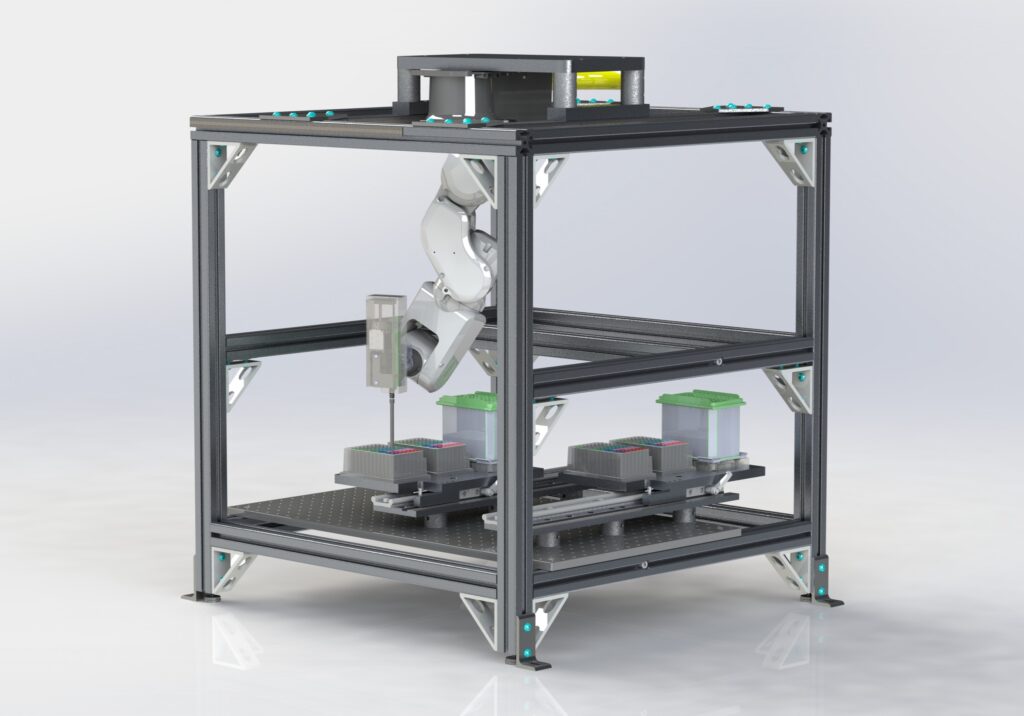
After narrowing down the industrial robot, Simplexity designed and built a testbed that could implement the top two robot candidates to evaluate them with the modeled system geometry. Using the completed testbed, Simplexity was able to compare the RoboDK values to the real system capabilities.
Mechanical Engineering
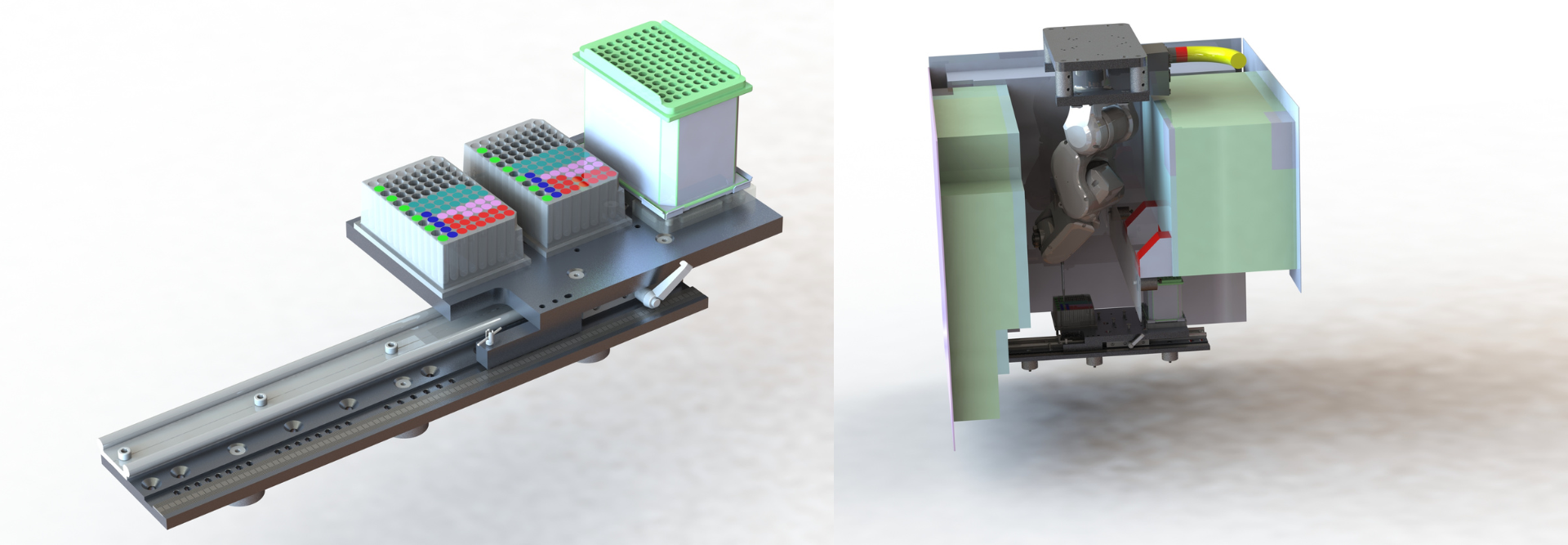
The major mechanical constraints were available space, short schedule, and matching the workflow. This included evaluating the robot for the correct reach to meet the required workflow. To reduce schedule, the mechanical design included readily available 80/20 extrusion components to make the structure, supplemented with custom machined parts. By designing the testbed to integrate multiple industrial robots, this system could be used to evaluate multiple automation systems with minimal configuration changes, ensuring consistent comparison data. This testbed was also designed to be tuned or adjusted to evaluate different spacing or reach requirements.
Simplexity built simplified 3D printed surrogates for the surrounding subsystems to ensure the industrial robot was evaluated in the final configuration prior to final production assembly’s availability. This optimized the development time in parallel with the long lead procurement cycle of the final design.
Systems Engineering
The development included a significant focus on final integration with client subsystems. To ensure seamless integration, Simplexity systems engineers used the vendor’s software to build a virtual environment and programmed a virtual version of the robot (a digital twin) to increase development prior to receiving the robot.
Completing a significant portion of the programming early reduced the impact of the lead time on the integration of the final system and allowed for the team to quickly integrate and move into operation and testing.
System engineers also created automated testing programs to implement longer reliability testing without significant labor required.
Results: Robotics Automation for Biotech Applications
Using commercially available industrial automation tools and software, Simplexity was able to bring in the needed product development expertise to quickly down-select, integrate, and validate an industrial robot into a client’s instrument for laboratory equipment. This proved a quick and effective way to get highly reliable industrial automation into a product with minimal development costs.
Industrial robots with 6 degrees of freedom (6DOF) are widely available, and can be run consistently (24/7) to increase production and maintain reliability.
Alternatively, semi-custom systems risk very long lead time, easily in excess of 24 weeks to get a functioning system operational.
By implementing an industrial robot, Simplexity was able to design, build, test, and deliver a validated system within 12 weeks. It also reduced the need for reliability and life testing of a custom solution, as the off-the-shelf robots come with reliability testing results.
Simplexity worked to ensure that the robotic solution was easy to control (software/firmware) which allowed the team to implement the custom automated workflow commands quickly with minimal time. As client needs change, so does the workflow. This approach reduced labor in both the development and sustainment of the workflow.
Simplexity completed knowledge transfer with the client team, ensuring that the system seamlessly integrated at the client facility upon delivery.