Haptically Enabled Smart TV Remote
The Product/Concept
Smart TVs are ubiquitous. These devices are compact, internet-connected personal computers with large displays, integrated speakers, and a small hand-held wireless remote. The remote controls that are provided by manufacturers typically have 10+ small buttons that are usually about 8mm in diameter. Navigation often requires the user to look away from the screen and look at the button array and/or memorize the button array.
The Challenge
The main project challenge was to design and prototype a novel smart TV remote that allows a user to navigate and browse the on-screen menu with:
- Minimal ramp/learning: The user should be able to browse the menus intuitively with minimal learning needed.
- Heads up browsing: The user should be able to browse menus without having to look down and hunt for the button layout.
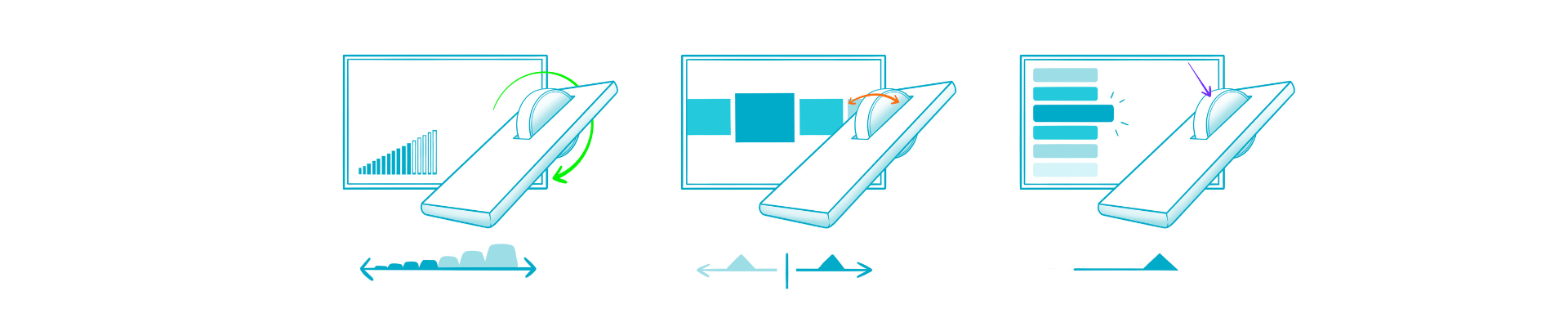
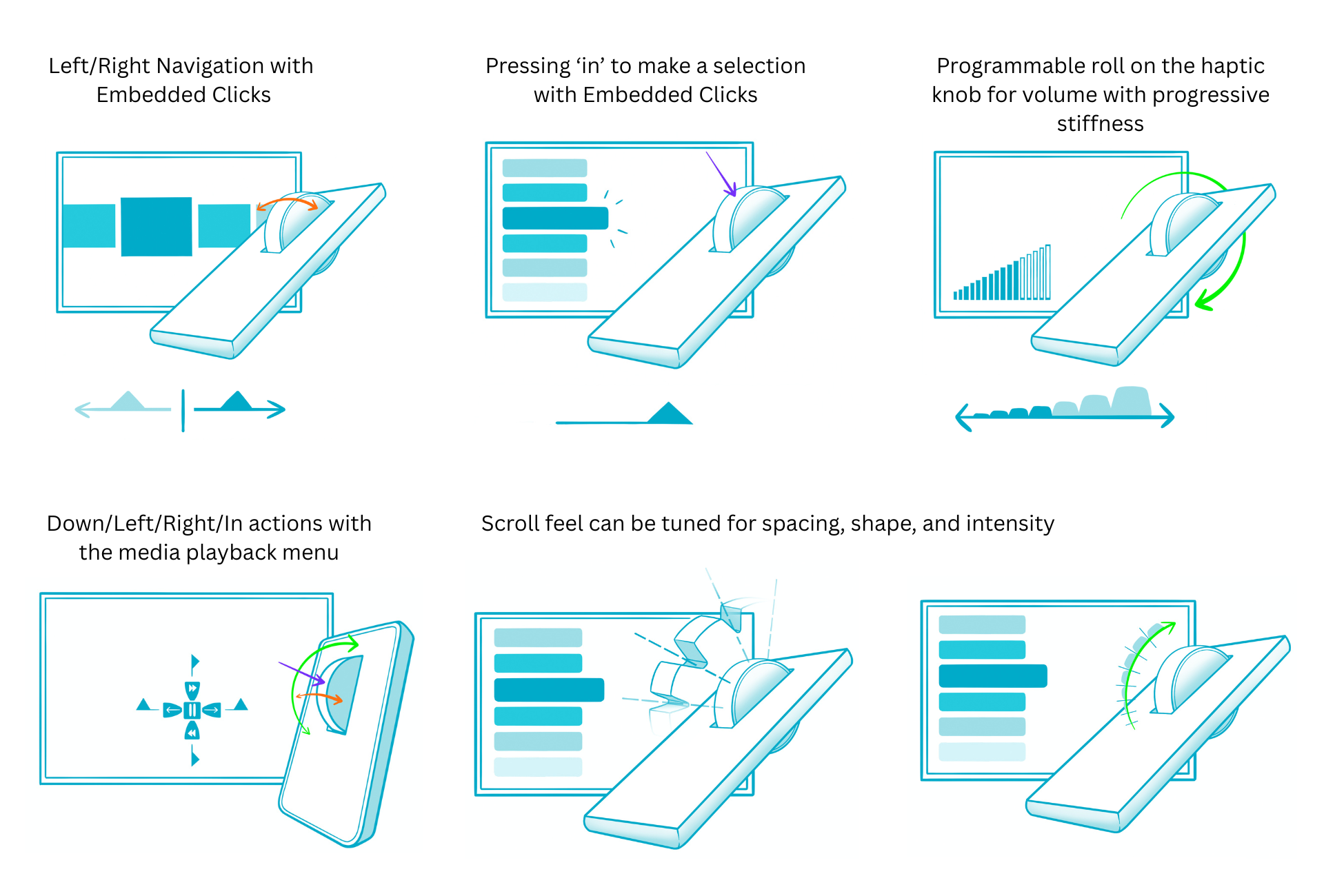
- Contextual Roll Up/Down: The programmable haptic feedback should allow intuitive feedback that improves accuracy and satisfaction when interacting with different UI widgets.
The Simplexity team collaborated with the client through brainstorming and concepting sessions to come up with possible solutions. To test the most promising ideas, Simplexity created a proof-of-concept prototype. The solution was a remote that was similarly sized to conventional remotes, but with an embedded rotating haptic knob that replaces the conventional fixed keypad. This haptic knob can also be pressed ‘in’, twisted ‘left’, and twisted ‘right’ to maintain the functionality of navigating screen menus.
The delivered proof-of-concept prototype was mostly 3D printed with some machined parts as required for improved design and feel.
Ergonomic Design
Simplexity designed and built multiple non-functional breadboard handpieces that could be held by users while still being able to house the haptic knob, electronics, and suspension. Several variations were generated to allow user preference trends to refine the appropriate size of the active knob along with the overall form factor of the handpiece.
Actuation Prototyping Strategy
An important step in haptic experience development is to prototype candidate architectures early. This strategy was employed to identify user preferences. The major parameter that was studied in this project was the actuator class of the haptically enabled roll axis. Both an active torque breadboard and a programmable friction brake breadboard were rapidly built and tuned to allow users to test both actuator paradigms. These early ‘breadboards’ were supported by DIP packaged and solderless circuits, 3D printed/laser cut/hand-built support structures, and rapidly available actuator candidates.
Mechanism Design
A compact suspension system was designed that allowed the haptic knob to float several millimeters ‘in’ before touching a switch, then twist ‘left/right’ with a pleasant angular travel before touching physical switches. This portion was rapid prototyped with 3D prints for quick iteration before machined parts were designed for the final refinement.
Systems Design
An impedance haptic interface paradigm, where torque to the user is presented as a function of position, was chosen as the governing design. An off-the-shelf current amplifier was paired with a compact graphite brushed DC motor for low friction and low torque ripple. A high-resolution optical encoder was chosen to maximize position measurement resolution.
Firmware
Prototype firmware was developed using an STM32 processor. A hard real-time control loop running at 1kHz was implemented for the haptic control algorithms. Control data streams over a high-speed UART for visualization and debugging. Digital filters for input position/velocity and output torque scaling/smoothing were tuned to the chosen actuator to reduce palpable artifacts.
Electronics
Initially, a breadboarded circuit was designed and tuned for signal processing and level shifting of the haptic torque signal in preparation for amplification. This circuit was then captured and built into a quick-turn PCB for improved reliability and consistency.
Summary
Simplexity designed, iteratively breadboarded, and delivered 3 copies of a functional prototype smart-tv remote, with integrated haptics, to the client’s experience team. This effort was deemed a success, and the technology will appear in a future generation of the client’s controller hardware.